





VoxelNet: A Revolutionary Approach to 3D Object Detection in Autonomous Driving

In the rapidly evolving realm of autonomous driving, advanced technologies play a pivotal role in ensuring safety and efficiency. Among these innovations, VoxelNet has emerged as a game-changer in the field of 3D object detection, offering unparalleled capabilities and accuracy. This article will delve into the intricacies of VoxelNet, exploring its architecture, advantages, and applications in autonomous driving systems.

Understanding VoxelNet Architecture
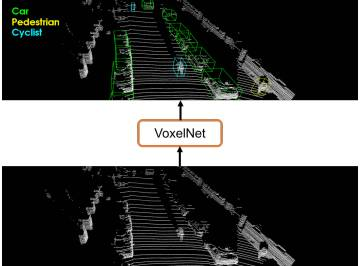
VoxelNet is a novel deep learning architecture specifically designed for processing point cloud data in 3D space. Unlike traditional methods that rely on two-dimensional projections, VoxelNet operates directly on the three-dimensional representation of an environment. The core of VoxelNet consists of voxelization, where the point cloud data is transformed into a structured grid of voxels, allowing for efficient processing and feature extraction.
The architecture of VoxelNet includes several key components, such as:
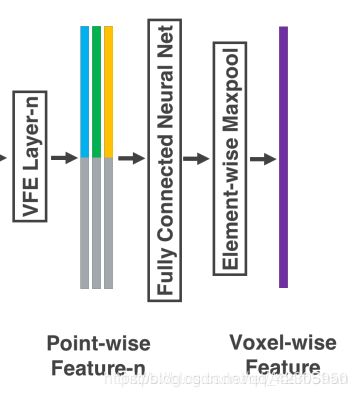
- Voxel Feature Encoding: This stage involves computing detailed features for each voxel by incorporating information from the surrounding points, enhancing the model’s ability to understand complex structures.
- 3D Convolutional Layers: Utilizing 3D convolutions enables VoxelNet to capture spatial hierarchies and relationships between voxels effectively, leading to enriched feature maps.
- Object Detection Head: Finally, the model employs a detection head that generates bounding boxes and class probabilities, culminating in precise identification and localization of objects.
Benefits of VoxelNet in Autonomous Driving
The implementation of VoxelNet brings several distinct advantages to the autonomous driving sector:
- High Accuracy: By directly processing 3D data, VoxelNet achieves impressive detection accuracy, which is crucial for the safety of autonomous vehicles on the road.
- Robustness to Noise: VoxelNet demonstrates a remarkable ability to handle noisy point cloud data, prevalent in real-world driving scenarios caused by environmental factors like rain and fog.
- Real-Time Processing: With its efficient architecture, VoxelNet allows for real-time processing of 3D data, a necessity for immediate decision-making in autonomous driving applications.
In summary, VoxelNet represents a significant advancement in 3D object detection technology within the autonomous driving landscape. Its innovative architecture and robust performance make it an essential tool for enhancing the safety and efficiency of self-driving vehicles. As the field continues to progress, the integration of VoxelNet and subsequent improvements hold the potential to revolutionize how autonomous systems perceive and interact with their environment.













